[ Instrument network instrument research and development ] Recently, the Shenyang Institute of Automation of the Chinese Academy of Sciences and the Edinburgh Robotics Centre have made new progress in research, and proposed a mobile robotic arm autonomous operation method based on deep reinforcement learning in a dynamic, unstructured environment. Intelligent learning theory is successfully applied to the control of real complex mobile robotic arms.
The Shenyang Institute of Automation Chinese Academy of Sciences of the Chinese Academy of Sciences was established in November 1958. At the beginning of its establishment, it was called the Liaoning Institute of Electronic Technology. In April 1960, it was renamed the Institute of Automation of the Liaoning Branch of the Chinese Academy of Sciences. From 1962 to 1972, it was named the Northeast Institute of Industrial Automation of the Chinese Academy of Sciences. Shenyang Institute of Automation. The main research direction of the institute is robotics, industrial automation and optoelectronic information processing technology. As the cradle of Chinese robotics, the institute has created more than twenty firsts in the development history of Chinese robotics, leading the research and development of Chinese robotics. In addition, the institute is also the owner of the "Experiment 1" scientific research vessel.
Robots operating in a large number of dynamic, unstructured environments such as space, land, and underwater are complex tasks. Compared with traditional industrial robots, they are more demanding, and usually require the robot to have multiple functions such as perception, navigation, decision making, and operation.
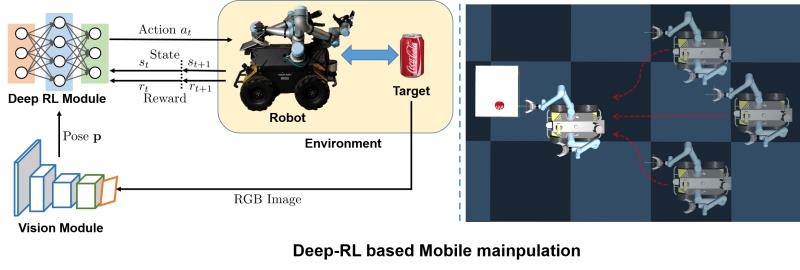
The Shenyang Institute of Automation and the Edinburgh Robotics Center scientific research team jointly used a neural network to build a robot's overall reinforcement learning control model. The deep learning method was used to process the environment and target information obtained by the robot camera, and then the perception information and the current state of the robot were used as the system. Input to autonomously control the overall behavior of the robot. Through the interactive learning and training in the simulation and the actual environment, the autonomous operation of the mobile robotic arm in the real environment is finally realized, which lays the foundation for the deep reinforcement learning to be applied to the more complex underwater floating base robot system to carry out the autonomous operation research. .
Manipulator refers to a complex system with high precision, multiple inputs and multiple outputs, high nonlinearity and strong coupling. Because of its unique operating flexibility, it has been widely used in industrial assembly, safety and explosion protection.
The manipulator is a complex system with uncertainties such as parameter perturbation, external interference, and unmodeled dynamics. Therefore, the modeling model of the robotic arm also has uncertainties. For different tasks, it is necessary to plan the motion trajectory of the joint space of the robotic arm, so that the cascade constitutes the end pose.
Under the strategic cooperation framework (MoU) relying on the State Key Laboratory of Robotics of the Shenyang Institute of Robotics and the Edinburgh Robotics Center, the two sides actively carry out mutual visits, academic exchanges and joint training of graduate students, and cooperate in multiple research areas, including Robot control based on deep reinforcement learning, vision-based underwater 3D scene reconstruction and target recognition, autonomous operation of underwater robots, etc.
Underwater robot, also called unmanned remote control submersible, is a kind of extreme working robot that works underwater. The underwater environment is harsh and dangerous, and the depth of human diving is limited, so underwater robots have become an important tool for developing the ocean.
There are mainly two types of unmanned remotely controlled submersibles: cabled remote controlled submersibles and cableless remote controlled submersibles. Among them, cabled remote controlled submersibles are divided into three types: underwater self-propelled, towable and crawling on subsea structures. .
With the deepening and strengthening of cooperation, more scientific research results will continue to be produced in the future to promote the common progress of related scientific research on both sides.
Non-contact Car Washing Machine
Non-Contact Car Washing Machine,Contactless Car Washing Machine,Contactless Car Wash,No Contact Car Wash Device
Xuzhou kushuilong Machinery Equipment Co., Ltd , https://www.kslcarwash.com